
自動駕駛汽車是一個備受爭議又引人入勝的話題,它依賴高級駕駛輔助系統 (ADAS) 來實現高水準的安全性和舒適性。雖然目前尚無完全自動駕駛汽車,但現有技術已實現自動轉向和自動停車等功能。
這些汽車使用先進的電腦視覺系統來分析周圍環境,並根據各種感測器做出智慧決策。本文將介紹電腦視覺的基礎知識及其如何提升自動駕駛的效率,以及該領域預期面臨的挑戰和創新。

什麼是電腦視覺?
電腦視覺是一種使機器能夠看到並識別周圍環境中物體的技術。它是視覺的一個子集,專注於在機器人和車輛等自主機器中實現視覺引導物體偵測的工業應用。
現今的電腦視覺技術運用深度學習人工智慧演算法,例如捲積神經網路 (CNN),來建構穩健且泛化能力強的模型,從而能夠在各種條件下準確識別物體。這使得機器視覺技術能夠在製造業、農業、機器人技術和汽車產業等各種對可靠性要求更高的任務中得以應用。
電腦視覺如何在自動駕駛汽車中發揮作用?
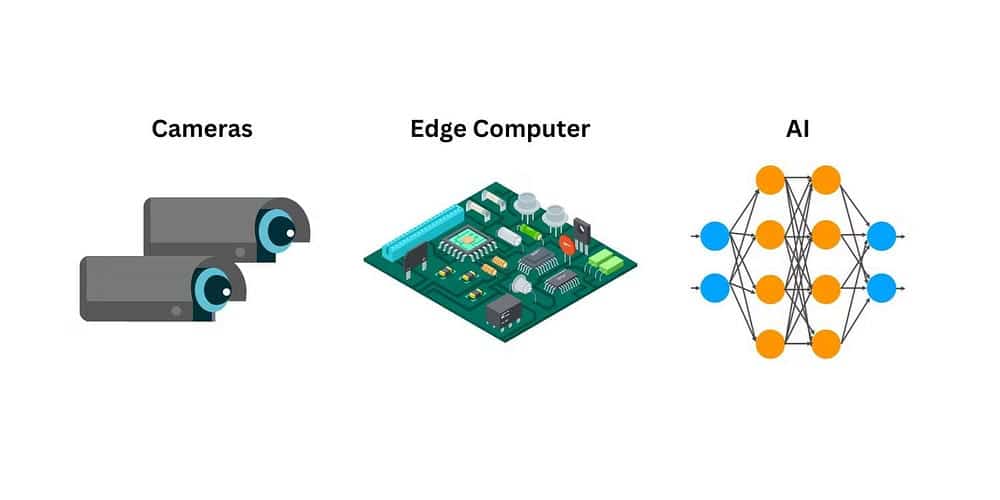
自動駕駛汽車中的電腦視覺通常可分為三個部分:攝影機系統、處理(邊緣運算)和人工智慧。這套技術使自動駕駛汽車能夠在行駛過程中看到、推理並識別各種標誌和障礙物。讓我們深入討論每個部分,以了解這些技術如何組合在一起形成自動駕駛汽車的機器視覺。
網路攝影系統
電腦視覺依靠攝影機系統來收集有關環境的視覺資訊。自動駕駛汽車使用安裝在車輛周圍的多個攝影機來收集盡可能多的視覺資訊。
機器視覺攝影機主要使用兩種感測器:互補金屬氧化物半導體 (CMOS) 和電荷耦合元件 (CCD)。對於自動駕駛汽車而言,CMOS 技術通常因其快速的讀出速度、強大的電子元件和平行處理能力而成為首選,使其成為速度最快的感測器。不同的照明模式、數位夜視和濾光片等解決方案或許可以在非理想照明條件下為 CMOS 感測器提供幫助。
對於自動駕駛汽車,攝影機會以特定距離安裝,以產生立體視覺。立體視覺是指將兩個或多個視覺輸入結合起來,從而在物體和環境中創造出深度感或三維感的能力。這反過來又使汽車能夠進行三角測量,計算出物體與車輛之間的大致距離。
由於人類有兩隻眼睛,我們也受益於立體視覺。你可以親自測試這種視覺:閉上一隻眼睛,從桌子上選擇一個小物體。將手放在物體的側面,確保物體邊緣至少距離你兩英吋。試著暫停幾秒鐘,觀察你對近似值的信心有多大。現在,試著睜開雙眼,看看你的深度感有多強。
邊緣運算
邊緣運算是將資訊儲存和運算能力拉近到產生資料的裝置和與其互動的使用者之間的距離的過程。傳統上,應用程式將資料從感測器和智慧型手機等智慧型裝置傳輸到中央資料中心進行處理。然而,前所未有的資料複雜性和大量資料已經超出了網路能力的承受範圍。邊緣運算系統將處理能力拉近到更靠近使用者和裝置的位置,從而顯著提升應用程式效能,降低網路頻寬需求,並提供更快的即時洞察。
當自動駕駛汽車的攝影機系統收集資料時,車載電腦(邊緣處理器)會即時處理所有輸入,以便立即更新系統的環境狀態。雖然典型的電腦視覺任務可以透過雲端運算節省成本,但將自動駕駛汽車與雲端捆綁在一起的風險實在太大,即使是由於將機器視覺需求的流程外包,也是如此。
使用先進的電腦處理輸入資料可以消除延遲問題,並確保即時接收、處理和傳輸資料。用於自動駕駛汽車的先進電腦使用整合 AI 圖形處理器(例如 NVIDIA 的 Tensor Core 和 CUDA Core)的專用電腦。
人工智慧演算法
演算法一直是機器視覺的重要組成部分。演算法使電腦能夠識別攝影機系統提供的所有圖案、形狀和顏色。使用人工智慧取代傳統的電腦視覺演算法,可以大大增強自動駕駛汽車可靠地識別物體、路牌、道路標記和交通號誌的能力。許多人工智慧演算法被用來訓練自動駕駛汽車。最受歡迎的演算法包括:
- YOLO (你只需看一次):一種即時物體偵測演算法,可辨識和追蹤車輛視野內的物體。
- 篩 (Scale-Icar'sant Feature Transform):用於提取特徵,幫助汽車識別周圍環境中的地標和獨特物體。
- 有向梯度圖 (豬): 它用於物體識別,專注於從圖像中提取局部模式和梯度。
- TextonBoost: 一種透過分析環境中的紋理來幫助識別物體的演算法。
- AdaBoost: AdaBoost 用於資料分類,它結合多個弱分類器來對汽車行駛路徑中的物件和障礙物做出穩健的決策。
電腦視覺在自動駕駛汽車中的重要性
電腦視覺是自動駕駛汽車感知和理解周圍環境的主要方式。如果沒有機器視覺,自動駕駛汽車很可能只能達到一級自動駕駛水平,甚至可能永遠無法實現完全自動駕駛。
由於機器視覺,自動駕駛汽車現在能夠對物體進行分類、偵測車道和號誌、識別標誌和識別交通。
儘管現在許多自動駕駛汽車都使用了各種感測器,例如光達、雷達和聲納,但它們都嚴重依賴電腦視覺來觀察環境、識別物體以及理解道路標誌和交通號誌的含義。所有這些附加感測器的唯一目的都是為了增強機器視覺,並提高人員、動物和財產的安全。
然而,機器視覺無需其他感測器的協助即可獨立運行,提供自動化控制功能。事實上,特斯拉最新的自動駕駛汽車已經放棄了雷達系統,現在其自動駕駛系統完全依賴機器視覺。
雖然這不一定會質疑其他感測技術的實用性,但它確實證明了電腦視覺在自動駕駛汽車中的重要性和力量。
常見問題
Q1. 什麼是電腦視覺技術? 在自動駕駛汽車中?
電腦視覺技術是一種基於硬體和軟體的系統,用於分析和解釋圖像和視頻,使自動駕駛汽車能夠識別周圍環境並在駕駛時做出決策。
Q2. 電腦視覺技術是如何運作的? 在汽車裡?
該車輛配備多個攝影機和感測器,用於捕捉周圍環境的影像和影片。先進的軟體會處理這些數據,分析影像並識別道路上的各種物體和地標。
Q3. 電腦視覺技術的重要性是什麼? 自動駕駛嗎?
電腦視覺技術對於自動駕駛至關重要,它能夠識別交通標誌、其他車輛以及道路上的障礙物。這些即時資訊是自動決策的基礎,包括車輛轉向和事故避免。
Q4.機器視覺技術面臨哪些挑戰?
電腦視覺技術面臨的挑戰包括霧和雨等惡劣天氣條件、在完全黑暗中難以辨識物體以及資料保護和隱私等因素。
Q5. 您對該領域未來的發展有何預期?
預計電腦視覺技術將持續發展,人工智慧的應用將更加完善,感測和影像辨識能力也將不斷提升。這項技術也有可能擴展到汽車以外的領域。
自動駕駛汽車中機器視覺的未來
電腦視覺是自動駕駛汽車的基礎。借助機器視覺,汽車可以像人類一樣觀察和感知周圍環境。儘管挑戰依然存在,但電腦視覺在安全和導航方面的優勢不容小覷。展望自動駕駛汽車的未來,人工智慧、邊緣運算和/或攝影機技術的進一步發展將提高自動駕駛汽車的效率,並可能將其推向更高的自動化水平。
評論被關閉。